Ospito con molto piacere un nuovo articolo scritto per questo blog dall’amico
Paolo G. Calisse, astronomo che ha lavorato per vari progetti come ALMA,
Simons Observatory, CTAO e primo italiano a trascorrere un anno intero al Polo
Sud, sempre lavorando come astronomo al locale osservatorio. In questo
articolo spiega bene un aspetto poco conosciuto delle attività spaziali e in
particolare della Stazione Spaziale Internazionale: come si mantiene o si
cambia l’assetto di un veicolo spaziale orbitante? – Paolo
Giroscopi e ruote di reazione
Alcune recenti dichiarazioni riguardanti la Stazione Spaziale Internazionale
(ISS) fatte da Dmitry Rogozin, capo dell’Agenzia Spaziale Russa Roscomos,
hanno suscitato un certo sconcerto tra gli appassionati del settore e nel
grande pubblico. Una delle minacce derivanti da queste dichiarazioni sarebbe
infatti quella di far rientrare la Stazione in maniera incontrollata, con la
possibile caduta di frammenti su zone abitate, in caso di esclusione della
Russia dagli accordi di collaborazione con NASA ed ESA a causa della guerra in
Ucraina.
Rogozin ha infatti affermato che in caso di perdita dell’appoggio russo alla
Stazione Spaziale Internazionale si renderà impossibile compensare la
progressiva perdita di quota dovuta all’attrito aerodinamico (che esiste anche
a 400 km dalla superficie terrestre, dove orbita la Stazione) senza l’ausilio
delle navicelle russe. Questa operazione viene detta reboost.
Già deorbitare la ISS alla fine della sua vita operativa sarà comunque
un’operazione estremamente delicata, che richiederà un’accurata
pianificazione
per scongiurare rischi per la popolazione a terra e tre veicoli spaziali per
un rientro prevedibile e sicuro. Ma nel discutere la questione l’attenzione si
è appuntata sui reboost (si vedano per esempio gli
articoli già pubblicati su questo blog). Come spiegato da Paolo Attivissimo, questo problema sarebbe eventualmente
risolvibile usando i retrorazzi di capsule USA. C’è da dire, però, che questa
operazione, se compiuta dalle navicelle USA disponibili oggi (Dragon,
Cygnus) o anche in un futuro vicino (Dream Chaser), sarebbe per ragioni di progettazione meno efficiente rispetto a quanto
possibile tramite le navicelle russe Soyuz e Progress.
Per dirla con Joel Montalbano, ISS Program Manager:
Le navicelle Cygnus sono progettate per fare il reboost, ma hanno bisogno dei
propulsori russi per il controllo dell'assetto durante questa operazione.
Così, mentre la navicella Cygnus si occuperà del reboost, i propulsori
russi della Progress saranno attivi per aiutare il controllo dell'assetto. I
propulsori della navicella Cygnus non sono abbastanza potenti da controllare
l'assetto durante il reboost.
Le parole di Montalbano (Joel, non il noto commissario) sollevano un altro
problema che andrebbe affrontato in caso di un eventuale ritiro del contributo
russo dal progetto ISS: quello del mantenimento dell’assetto della ISS.
Alcuni lettori di questo blog, commentando gli articoli di Paolo, hanno
chiesto come si cambia, o si mantiene, l’orientamento della ISS. La risposta è
complessa. Infatti, a causa della massa e delle superfici molto estese in
gioco ci sono diversi effetti tendenti a creare una coppia che fa ruotare la
stazione spaziale nel corso di ogni orbita. I principali sono:
-
Le forze mareali generate dall’attrazione della Terra sulla ISS e
dovute al fatto che alcune componenti sono più vicine al nostro pianeta e
altre più lontane, seppure di poco e
-
L’attrito aerodinamico generato dal fatto che mentre la ISS ruota in
genere in sincronia con la Terra, mantenendo sempre la stessa faccia rivolta
verso la Terra (ovvero compiendo una rotazione lungo un asse per orbita), i
pannelli solari inseguono il Sole, causando variazioni continue nel
coefficiente di attrito aerodinamico.
Questi due effetti, insieme ad altri più sottili come la pressione generata
dal vento solare e le
disuniformità del campo gravitazionale della Terra nel corso
dell'orbita, causano una coppia che tende a far perdere alla Stazione
l'assetto richiesto, visto che il suo baricentro è in posizione diversa dal
centro della risultante di queste forze. Questa continua tendenza a ruotare
varia lentamente e costantemente, influenzando tra l'altro gli esperimenti in
microgravità a bordo, che hanno bisogno di condizioni e di un assetto
estremamente stabili.
Volare nel vuoto
Vediamo come questo effetto viene contrastato dal controllo a terra. È facile
immaginare che ruotare un oggetto in orbita usando i retrorazzi richieda un
notevole dispendio di propellente e, in aggiunta, produce gas di scarico che
possono danneggiare le componenti esterne della stazione. Tuttavia il
controllo d'assetto di un veicolo spaziale può essere operato in genere
mediante dispositivi che usano energia elettrica, senza richiedere l'uso di
"consumabili" a bordo. L'energia elettrica può essere infatti prodotta con
pannelli solari o in alcuni casi con i TEG, o
Thermo Electric Generator, che usano materiali radioattivi come
sorgente di energia.
Per generare le forze necessarie alla rotazione nel vuoto (senza un punto di
appoggio) si usano due tipi diversi di dispositivi: le
ruote di reazione (dall'inglese reaction wheels) e i
giroscopi. Entrambi fanno uso di masse in rotazione, ma si basano su
princìpi abbastanza diversi. I giroscopi vengono spesso ritenuti uno strumento
più utile a misurare l’assetto di un oggetto, come avviene da tempo in
aviazione, ma come vedremo possono e vengono usati da tempo anche per
modificarlo nello spazio vuoto, dove l’attrito è quasi nullo e non si può fare
uso di superfici di controllo aerodinamiche.
Consideriamo quindi il caso specifico della ISS, che con la sua massa di circa
420 tonnellate (come 10 vagoni ferroviari) ed il suo enorme momento di inerzia
dovuto alla sua grande estensione (quasi pari a quella di un campo di calcio)
è di gran lunga l’oggetto più massiccio e complicato da "spostare" mai messo
in orbita dall'essere umano.
Fig. 1 - La Stazione Spaziale Internazionale a novembre 2021, vista dalla
Crew Dragon Endeavour. Foto NASA
JSC2021E064215.
Il metodo usato per il mantenimento dell'assetto dai controllori a terra è
detto TEA, o Torque Equilibrium Attitude, che potrebbe essere
tradotto con assetto in equilibrio di coppia. Questo metodo funziona
brillantemente, gestendo l’attrito aerodinamico in modo da compensare la
rotazione dovuta alla variazione di gravità e consentendo di mediare più o
meno tutte le forze in gioco nel corso di un’orbita.
Tuttavia, per esempio
durante le EVA (Extra Vehicular Activity, ovvero le attività
extraveicolari richieste per la manutenzione o per l’installazione di
dispositivi all’esterno della ISS) o il docking/undocking
(attracco/sgancio) di una navicella, la stazione spaziale deve cambiare il proprio
orientamento, per esempio per consentire alle navicelle in arrivo l’attracco
lungo la direzione di volo e non provenendo dal basso. In questi casi può
accadere che l’assetto debba essere tale da presentare una superficie molto
grande nella direzione di avanzamento. Per consentire tali rotazioni bisogna
quindi applicare un momento alla ISS e poi mantenere l’orientamento voluto in
presenza di forze e momenti più elevati. Altre situazioni che possono
determinare una coppia aggiuntiva sono per esempio l’emissione di gas
(venting), necessaria per esempio per preparare al docking le
linee di alimentazione.
Esaminiamo il funzionamento del primo di questi dispositivi usati per la
rotazione di oggetti nello spazio, le ruote di reazione. Si tratta di
nient'altro che volani, dispositivi che immagazzinano energia rotazionale
conservando il momento angolare e che possono scambiare momento per fornire
stabilità al veicolo spaziale.
Il principio di funzionamento di questi oggetti è abbastanza facile da
comprendere: se si varia la velocità di rotazione del volano, la velocità di
rotazione di un veicolo spaziale dovrà per forza di cose variare in modo da
conservare il momento angolare complessivo. Ma c'è un problema: accelerare o
decelerare una massa pesante richiede l’erogazione di notevoli quantità di
energia. Ma soprattutto, la velocità di rotazione si accumulerà, arrivando a
toccare prima o poi i limiti strutturali del dispositivo. Si dirà a questo
punto che la ruota di reazione è saturata.
Una volta raggiunta la
saturazione, si dovranno usare necessariamente i retrorazzi dell'RCS (o
Reaction Control System) per riportare a zero la velocità, con
conseguente consumo di propellente. Il problema delle ruote di reazione è
anche che queste accelerazioni e decelerazioni richiedono quantità di energia superiori di
ordini di grandezza rispetto a quelle richieste dai giroscopi, che
come vedremo si basano su un principio diverso che le rende poco pratiche
per masse come quelle della ISS.
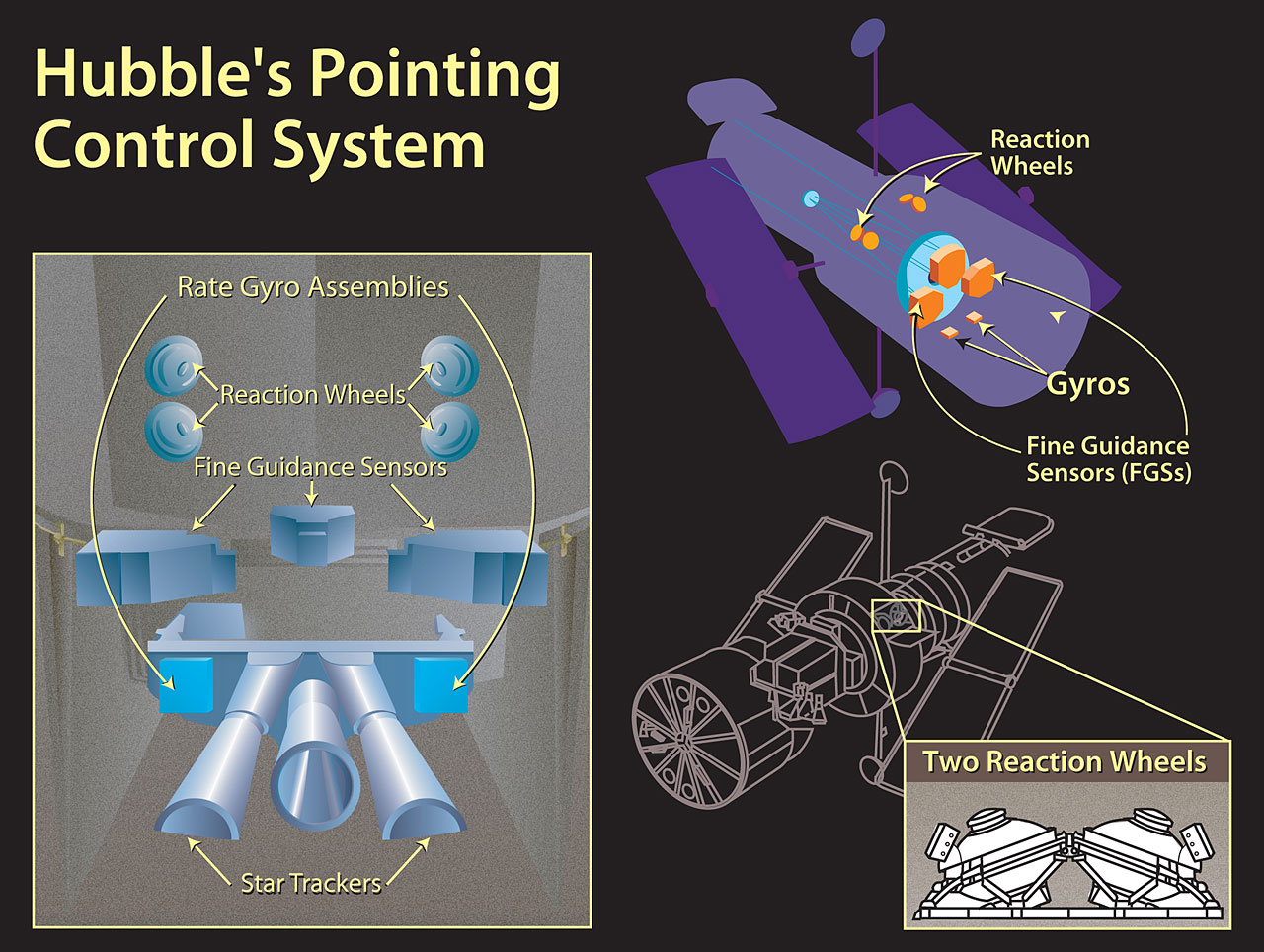
Fig. 2 - Sistema di puntamento del Telescopio Spaziale Hubble. Ci sono sei
giroscopi (che, come una bussola, puntano sempre nella stessa direzione) e
quattro ruote di reazione. Si sono verificati diversi guasti a questi
dispositivi. È probabile che costituiscano il limite di funzionamento di
questo satellite (
Credit: NASA, ESA, A. Feild e K. Cordes (STSci), e Lockheed Martin).
Un sistema alternativo impiegato per lo stesso fine è il giroscopio. Tali
dispositivi dispongono di una grossa massa rotante montata su di un telaio
(gimbal, in inglese) in grado di farne ruotare l’asse di rotazione
applicando una forza.
La differenza fondamentale rispetto alle ruote di
reazione è che
il volano, nel caso del giroscopio, ruota a velocità costante, risparmiando la quantità di energia elettrica necessaria per accelerarlo e
decelerarlo. Il risultato è un sistema di controllo dell’assetto non solo più
efficiente ma anche più preciso nel puntamento. Tecnicamente questi
dispositivi vengono indicati come CMG, o
Control Moment Gyroscopes, per indicare sia il giroscopio vero e
proprio che la piattaforma che lo contiene (vedi Fig. 3 e 4).
Fig. 3 - Un’immagine del CMG della ISS aperto durante il
commissioning a terra. I quattro volani sono contenuti all’interno
delle strutture dipinte di nero.
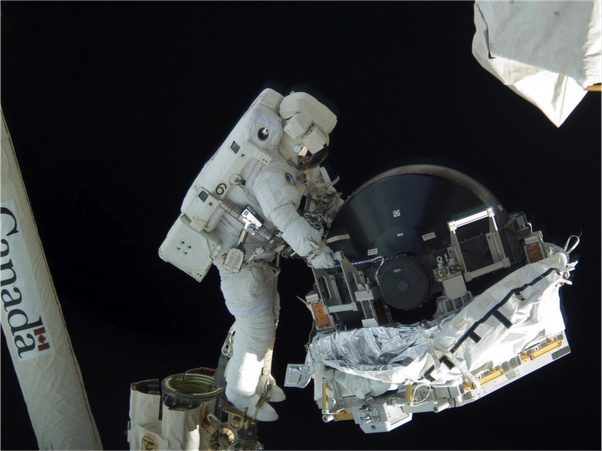
Fig. 4 - Un giroscopio guasto della ISS viene sostituito dagli astronauti
Soichi Noguchi e Stephen Robinson durante la missione STS-114 del 2005.
L’immagine dà un’idea delle grandi dimensioni dei volani presenti a bordo
della ISS.
Come noto, un oggetto in rapida rotazione tenderà a mantenere il proprio
asse di rotazione in direzione costante, come avviene per una trottola. Per
modificare l'assetto della ISS si applica una forza al gimbal che
supporta il volano. Questa forza produce un momento perpendicolare sia alla
forza applicata che all’asse di rotazione della massa inerziale. Ciò fa sì
che la ISS debba ruotare per conservare, ancora una volta, il momento
angolare complessivo del sistema. Si può comprenderne il principio cercando
di cambiare l’asse di rotazione di una ruota di bicicletta in rotazione, tenuta con le
mani tra le proprie braccia tese: si noterà che la ruota tenderà a
ruotare non come ci si aspetterebbe, ma in direzione perpendicolare sia alla
forza applicata che all’asse di rotazione.
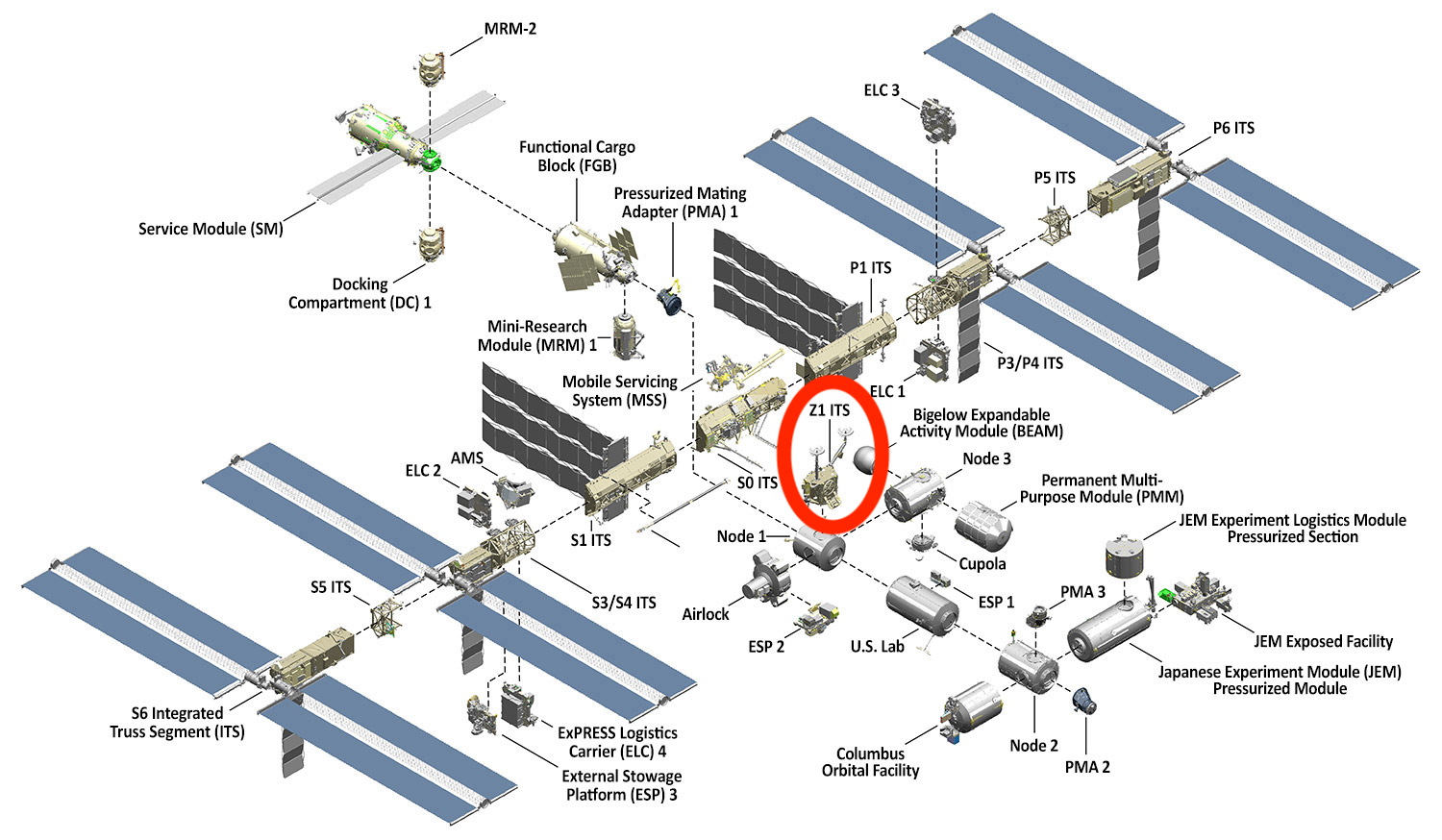
Il sistema CMG della ISS è montato nel modulo Z1 Truss, il primo
elemento ad essere messo in orbita (nell’ottobre del 2000 con la missione
STS-91), che si trova approssimativamente al centro dell’intera struttura e
contiene quattro volani del peso di 98 kg l’uno, che ruotano a 6600 rpm
nominali.
Fig. 5 - Esploso della Stazione Spaziale Internazionale. L'
Integrated Truss
Structure Z1, dove è installato il CMG, è indicato dal cerchio rosso (
Credit: NASA).
Quando sono in posizione neutrale (coppia nulla e posizione iniziale), gli assi di
rotazione di questi quattro grossi volani puntano verso il centro del quadrato.
Ogni volano gira in direzione contraria a quello opposto, generando in
totale una coppia nulla. Se invece si vuole far ruotare la ISS o cambiare il
suo assetto, si applica una forza al doppio gimbal sui quali sono montati i
volani in modo che la ISS ruoti nella direzione voluta.
Due giroscopi
sarebbero sufficienti per ruotare la ISS in tutte le direzioni. Tuttavia
averne quattro permette di avere una buona ridondanza ed efficienza nel
sistema.
Fig. 6 - Funzionamento del CMG della ISS. A sinistra: i quattro volani in
posizione neutrale. Al centro: parzialmente allineati. A destra: totalmente
allineati per fornire la coppia massima disponibile.
Tutto bene, sembrerebbe, ma il problema è che prima o poi l’asse di rotazione
del CMG si allineerà con la forza applicata. A quel punto il sistema non
sarà più in grado di creare alcuna coppia e bisognerà riportare i giroscopi
nella posizione iniziale e si dirà che il CMG è saturato. A questo
punto, come già visto con le ruote di reazione, l’unica soluzione è utilizzare gli RCS, con conseguente consumo di propellente e produzione
di gas di scarico.
La desaturazione del CMG avviene più di frequente dei reboost,
soprattutto dopo operazioni come il docking (attracco) e l’undocking
(sgancio) di una navicella, o una EVA (Extra Vehicular Activity) che, come già detto,
richiedono una variazione nell’assetto della ISS, sia all’inizio che alla
fine. In più, i retrorazzi dovranno puntare nella direzione giusta
(altrimenti la ISS, invece di ruotare, cambierebbe parametri orbitali) e in
maniera estremamente precisa per non creare rotazioni non volute.
Inoltre l’intero CMG deve essere estremamente affidabile per non incorrere
mai in una saturazione completa con la ISS ancora in rotazione e per
misurare con precisione la velocità angolare. Un satellite giapponese,
Hitomi, realizzato con la partecipazione di NASA ed ESA,
andò distrutto
poco più di un mese dopo il lancio, nel 2016, a causa di una serie di
malfunzionamenti ed errori progettuali presenti nel CMG di bordo che lo
portarono a ruotare su se stesso a velocità tali da farlo disintegrare
rapidamente. È chiaro che un rischio del genere è impensabile nel caso di un
satellite con astronauti e/o cosmonauti a bordo come la ISS. Va anche
considerato che se dovessero presentarsi dei problemi al CMG mentre la ISS è
in rotazione su se stessa e fosse necessaria la desaturazione, sarebbe di
fatto impossibile per una navicella di emergenza agganciarsi o sganciarsi
dalla stazione, rendendo impossibile l’uso di retrorazzi.
Il sistema deve anche agire in “loop chiuso”, in quanto i razzi devono
modulare la coppia con precisione per non consumare inutilmente propellente
e per puntare in ogni istante nella direzione giusta. Le navicelle russe
sono connesse al sistema direttamente. Le Dragon e le altre capsule USA, non
essendo progettate per questo scopo, non sono al momento – a quanto ho
capito, ma potrei essere smentito – in grado di garantire questo loop
chiuso, il che richiederebbe una modifica progettuale importante.
Comunque sia, anche a causa della posizione dei retrorazzi su queste
navicelle, l'operazione potrebbe non risultare molto efficiente. Ovviamente
si potrebbe aggiornare una delle navicelle USA disponibili per svolgere
questo compito al meglio. Ma la posizione dei retrorazzi sarebbe difficile
se non impossibile da cambiare in un veicolo già in fase avanzata di
progetto. Nella prospettiva realistica che la ISS venga decommissionata
entro qualche anno e considerato il tempo tipico necessario per sviluppare,
testare e validare anche minimi cambiamenti in questo settore, è improbabile
che una soluzione arrivi in tempo utile.
Naturalmente questo scenario è ipotetico e resta altamente improbabile.
Dichiarazioni a parte, le operazioni della Stazione Spaziale Internazionale
continuano come al solito. Nonostante le minacce di Rogozin,
astronauti e cosmonauti rientrano tranquillamente in Kazakistan. Insieme. Anche perché se proprio si volesse arrivare a dispetti reciproci
e a voler danneggiare deliberatamente città ed infrastrutture di Paesi terzi
al conflitto lo si potrebbe fare a terra molto più semplicemente. Senza
dimenticare che, come notato da molte fonti, la Federazione Russa
danneggerebbe prima di tutto se stessa e la sua unica possibilità di accesso
allo spazio per molti e molti anni.
Paolo G. Calisse, astronomo ed appassionato di astronautica

















{kind=link}